

3D(Dangerous, Dirty, Dull)
해상작업을 무인선으로
선박해양플랜트연구소 해양안전·환경연구본부 김선영 본부장
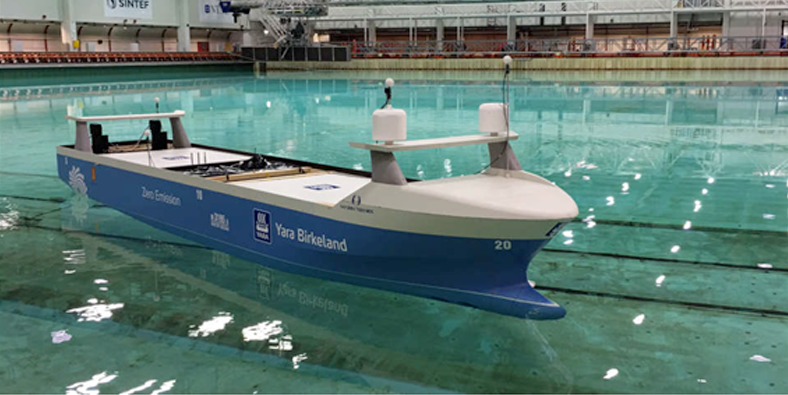
그림1) 노르웨이 Konsberg 사에서 개발 중인 100TEU 무인화물선 YARA 의 모형시험 모습
지구 표면의 70% 이상을 차지하는 바다는 식량과 자원의 보고이며 세계 물동량의 90%가 지나다니는 교통로로서 인간의 삶과 뗄 수 없는 공간이다. 반면에 해상작업을 위한 선박에서의 근무 환경은 일반적으로 가족과 떨어져 장시간 근무해야 하고, 협소한 선내 공간·소음·파랑중 선박 동요 등 매우 열악한 소위 3D(Dangerous, Dirty, Dull) 환경이다. 최근 해상근무는 젊은이들이 기피하는 직업군에 속하고 있고 향후 해상 근무 인력의 수급은 점점 더 어려워질 전망이다. 이로인해 선박에 사람이 승선하지 않고 육상에서의 원격 조종을 통해 해상작업을 수행할 수 있는 무인선에 대한 관심이 높아지고 있다.
인간이 무인선을 해상 작업에 활용하기 시작한 것은 생각하는 것보다 매우 오래된 일이다. 미 해군은 세계 2차 대전 직후 기뢰제거, 방사능 오염 검사 등 사람이 직접 수행하기 위험한 임무 수행에 무인선을 사용한 바 있다. 이후, 미 해군은 사격 훈련 표적용, 기뢰 탐색 및 제거, 항만 감시 등의 용도로 무인선을 꾸준히 개발하고 실전에 투입해 왔다. 민간 분야에서는 해양조사, 해양 감시, 수색 구조, 해양오염방제 지원 등에 약 40개 국가가 활용하고 있다. 무인선에 대한 신규 수요는 세계적으로 매년 약 1,000척 정도이며 시장 규모는 최근 5년 동안 평균 20% 정도로 증가하고 있어 2020년 까지는 약 1조원 규모로 성장할 것으로 전망된다.

그림2) 무인선 아라곤 2호
최근에는 EU를 중심으로 화물 운반용 대형 무인선에 대한 연구사업이 본격적으로 진행되고 있고 국제해사기구(IMO : International Maritime Organization)에서는 향후 해상에서의 무인화물선 운항에 대비하여 해상안전 및 환경보호를 위해 필요한 관련 규정 정비 작업에 착수했다.
우리나라 무인선 연구는 민군사업으로 선박해양플랜트연구소(KRISO)가 주도하여 수행한 「원격 선박통제 제어기술 개발(2005~2009)」이 처음일 정도로 외국에 비하여 매우 늦었다고 할 수 있다. 본 연구는 무인선을 원격으로 통제하는 기술을 개발하는 것이 주 내용으로 기술 개발 검증을 위한 테스트베드로서 무인선 “천리안”을 건조하여 운용한 바 있다.

그림3) 무인선 원격 관제시스템
본격적인 무인선 연구는 해양수산부의 해양장비 및 인프라구축사업 일환으로 수행된 연구과제 「다목적 지능형 무인선 국산화 개발(2011~2015)」에서 수행되었다. 본 연구는 실해역에서 해양조사 및 해양감시 임무 수행이 가능한 무인선 시제선 개발을 통해 무인선의 원천기술을 확보하는 것을 목적으로하고, 그동안 본 연구를 통해 3척의 무인선 시제선이 개발·건조되었다.

그림4) 2017년 11월 거제도 장목항 실해역 시연회 모습
최종 무인선 시제선 아라곤 3호는 최대속도 45노트이고 해상상태 4(평균파고 1.2~2.4m)에서도 35노트 이상의 고속으로 운항할 수 있는 고속·고내항 무인선이다. 무인선의 원격 제어는 육상 및 모선에 설치된 무인선 원격관제시스템을 통해 수행할 수 있다. 통신 거리 20km까지는 최대 16Mbps의 고속 무선통신시스템에 의해 고해상도 카메라 영상, 레이다 영상, 소나영상 등의 실시간 모니터링이 가능하다. 또한, 백업 및 비상통신 시스템으로 갖춘 보조통신 시스템과 위성통신 시스템은 최대 30km, 300Kbps, 한번도 해역 전체, 300Kbps 성능을 갖추고 있다. 무인선의 원격제어는 원격 수동제어와 자율 제어가 모두 가능하다, 자율제어의 경우 무인선에 탑재된 레이다, 카메라, AIS 및 라이다를 이용하여 무인선 주위의 고정·이동 장애물의 위치와 이동 방향·속도를 자동으로 계산하고, 자율 회피할 수 있는 자율운항시스템이 탑재되어 있다. 해양 조사 장비로는 멀티빔소나, CTD, ADCP 등이 탑재되어 수심, 수질, 해수 유동 등을 원격으로 측정할 수 있다. 해양감시 장비로는 열화상 카메라, 원격방송 시스템, 물대포 등이 탑재되어 불법 조업 선박들의 감시 및 단속 임무를 수행할 수 있다. 2017년 11월 거제도 장목항에서 두 번째 무인선 시제선인 아라곤 2호를 통해 자율 충돌회피, 해양감시 임무, 해양조사 임무등 실해역 시연회를 성공적으로 수행한 바 있다.

그림5) 해양조사 임무 수행 모습
해수부 연구개발사업을 통해 국내에서도 무인선을 자체 개발하고 운용할 수 있는 기술들이 확보되었다. 이미 개발된 해양조사 및 감시 임무 이외의 무인선이 수행할 수 있는 임무들은 다양하며 이들은 적절한 임무장비들을 무인선에 탑재하여 수행 가능하므로 해양 종사자들의 무인선 활용에 대해 관심을 가져 주기를 희망한다. 아울러, 실해역에서 무인선을 운용하기 위하여는 무인선의 인증 및 운용 관련 법규들이 정비되어야 할 것이다. 일본은 2022년까지 일본 연안에서 무인선 운항이 가능하도록 제도를 만들겠다는 계획을 발표한 바 있다. 해수부에서도 무인선을 운용하기 위한 제도 정비를 추진 중에 있으나, 신속하게 이루어져 우리나라에도 해상 3D 작업들을 무인선에 의해 대체해 나갈 수 있는 날이 앞당겨지길 바란다.

그림6) 자율 충돌회피 모습






 스마트폰으로
스마트폰으로한국해양재단
모바일 사이트 접속하기!